
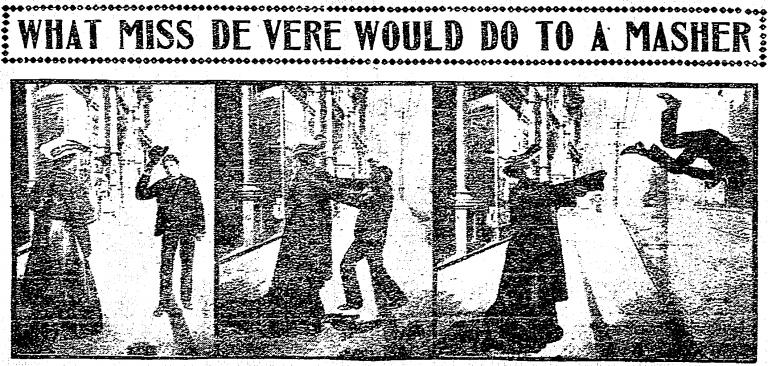
Ladies! Beware of Mashers on S.F. Muni During World War II
Here's the original 1940's S.F. Muni version of the story [...]
Here's the original 1940's S.F. Muni version of the story [...]
By Michael D. Setty, TRAC President The "Great Redwood Trail [...]
TRAC has submitted extensive comments to Caltrans regarding the next [...]
We have posted the latest issue of California Rail News [...]
For several reasons, TRAC has changed its mailing address. The [...]
In an effort to jump start rail service in Santa [...]





{kind=link}
{kind=link}
{kind=link}
{kind=link}